Alunos,
Como não tivemos aula no dia 25/11 devido ao SIEPE, estamos enviando uma atividade para repôr esta aula.
Quaisquer dúvidas podem ser retiradas pelos grupos de Whats ou Facebook.
Acesse aqui o material.
Att.
Equipe de Robótica.
Alunos,
Como não tivemos aula no dia 25/11 devido ao SIEPE, estamos enviando uma atividade para repôr esta aula.
Quaisquer dúvidas podem ser retiradas pelos grupos de Whats ou Facebook.
Acesse aqui o material.
Att.
Equipe de Robótica.
Clique aqui e tenha acesso ao material passado em aula.
Assuntos da aula: Exercícios sobre formas geométricas e aba de SOM.
Material sobre a segunda aula de Scratch, realizada em 14/10/2015.
A aula teve como assuntos: introdução ao Scratch e exercícios sobre a aba MOVIMENTO.
Veja abaixo a lista de presença:

Controle suas ausências. Lembrando que os alunos devem ter, no mínimo, 80% de presença.
Segue material da primeira aula de Scratch.
A aula de hoje, dia 01/07/2015, foi destinada à implementação de um sensor de obstáculo no robô.
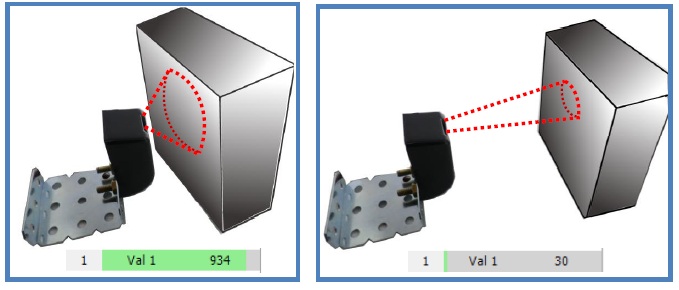
O sensor de obstáculo é um sensor analógico que nos permite saber quando um objeto está próximo. Quanto mais o robô se aproxima do obstáculo, maior será o valor da leitura.
O primeiro passo desta atividade é conectar o sensor de obstáculo ao robô, nosso carrinho.
Após conectado nas entradas corretas, é necessário programar o que o robô fará.
A programação em forma de fluxograma será seguindo a seguinte ideia:
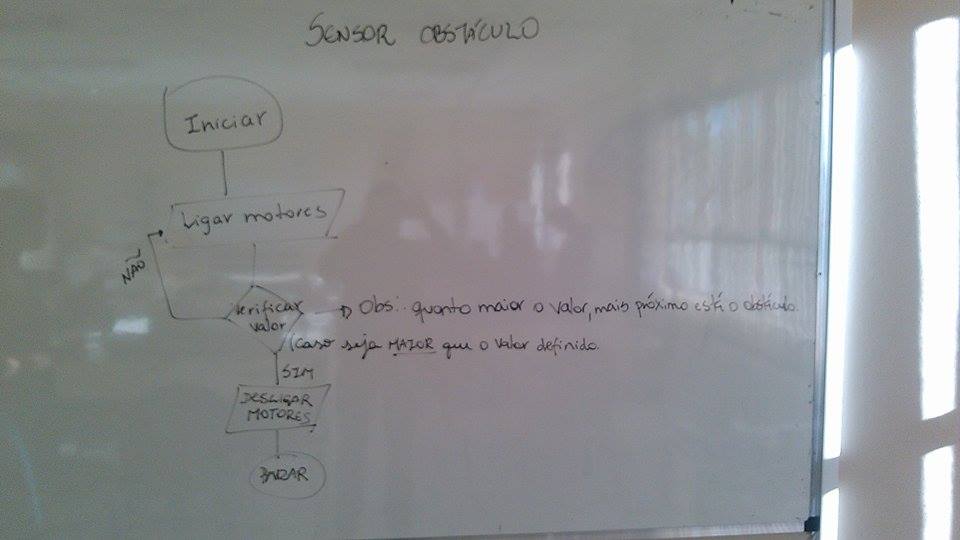
Os alunos ainda implementaram o programa fazendo com que o robô não pare de forma brusca, porém ele diminui a velocidade conforme se aproxima do objeto.
Faça download desta aula:Aula-Sensor-de-Obstáculo
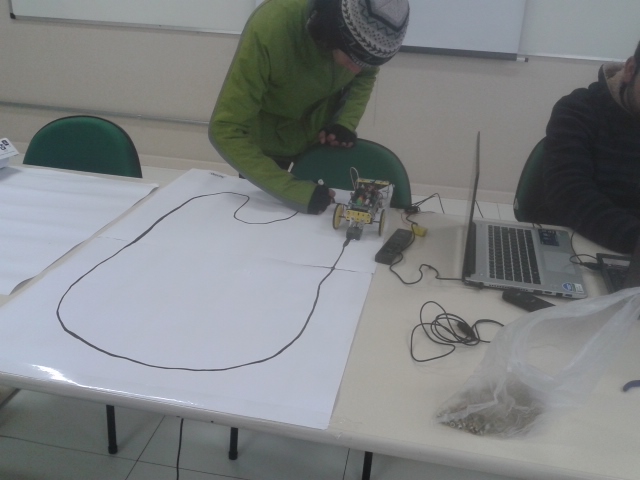
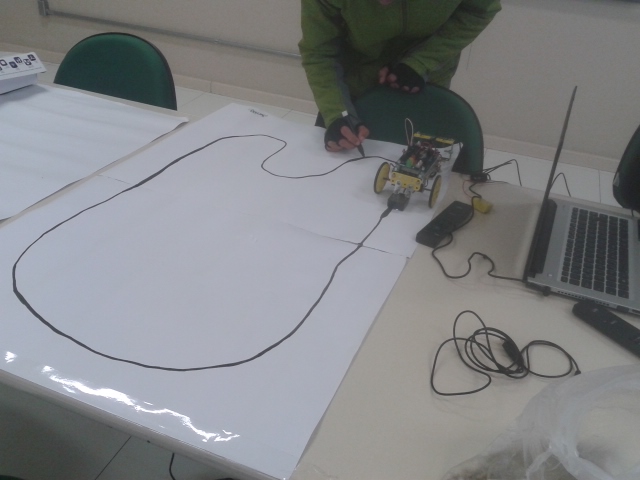
A aula do dia 24/06 utilizou de sensores de luminosidade para incrementar o projeto, nosso carrinho. A atividade do dia foi fazer com que o robô seguisse um caminho de linhas pretas em um fundo branco.
Os alunos, com uma cartolina branca, criaram o percurso que o carrinho deveria seguir, desenhando a rota em preto.
A partir dos dois sensores que reconhecem a variação de luz – claro e escuro – é enviado um sinal aos motores do robô, tornando-o capaz de seguir uma linha preta em uma superfície branca.